先进控制系统研究所
网站首页
科学研究
人工智能
无人系统
自动驾驶
无人机系统
机器人
智能交通系统
智能传感与电磁层析成像
非线性控制理论及应用
控制理论及应用
数据驱动控制理论与应用
网络化控制系统
先进检测技术
研究团队
新闻动态
招生就业
学术活动
资料下载
信息系统
留言反馈
关于我们
简体中文
English
无人系统
你的位置:
首页
>
科学研究
>
无人系统
全部
人工智能
无人系统
全部
自动驾驶
无人机系统
机器人
智能交通系统
智能传感与电磁层析成像
非线性控制理论及应用
控制理论及应用
数据驱动控制理论与应用
网络化控制系统
先进检测技术
IACS无人驾驶智能车
测试路段和比赛场地无人车视频
机器人编程与控制小视频
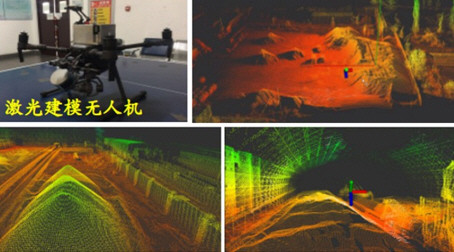
城区和野外环境激光SLAM建图与导航
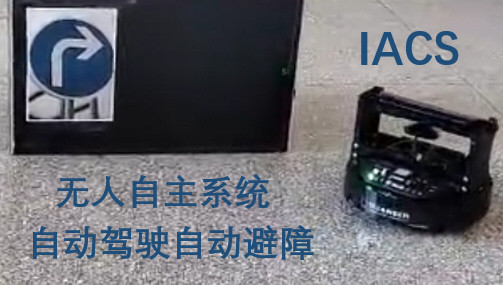
无人小车的路径规划和标志图像的分类识别
四旋翼无人机研究
无人系统SLAM及其应用
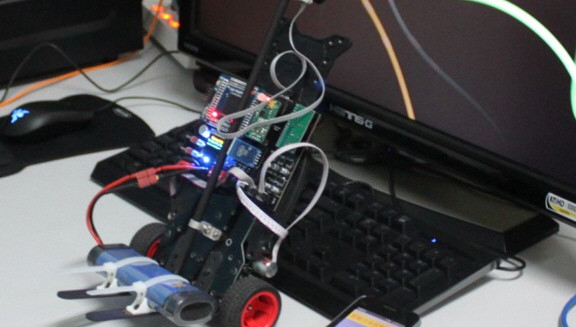
双轮自平衡小车
首页
上一页
下一页
末页